服务热线
010-6756 6879
服务热线
010-6756 6879
简要描述:
能够在外界影响下变形的智能资料在软体机器人等范畴具有宽广的使用远景。其间,铁磁液晶弹性体具有多影...
能够在外界影响下变形的智能资料在软体机器人等范畴具有宽广的使用远景。其间,铁磁液晶弹性体具有多影响呼应、多形式、多功能的特性,受到了研讨人员的重视。但是,现在缺少一种能够针对其两个功能域进行独立编程的办法,大大约束了其制作才能。近来,我国科学技能大学工程科学学院机器人与智能配备所李木军副教授课题组,联合近代力学系王柳特任教授以及南边科技大学刘吉副教授,提出了一种铁磁液晶弹性体的双各向异性可编程3D打印办法,成功完成了液晶取向和磁化强度的独立编程,以及制件在不同外场影响(热、光、磁)下的可控多形式变形。该论文以3D-printed ferromagnetic liquid crystal elastomer with programmed dual anisotropy and multi-responsiveness为题发表于世界学术期刊《Advanced Materials》。

该论文在墨水直写打印过程中经过外磁场和活动剪切完成铁磁液晶弹性体中铁磁域的磁化强度和液晶基元的取向。经过操控磁场与打印速度的方向和巨细,别离完成了磁化强度和液晶取向的自在编程。成果显现,在加热变形的一起,铁磁液晶弹性体仍具有磁变形力,且表现出现在3D打印智能资料中最高的单位体积内的包含的能量和呼应速度。在此基础上,研讨人员制作了一系列能够在不同外场次序下进行多形式变形的铁磁液晶弹性体执行器,并经过调控液晶弹性体基质的变形温度完成了次序变形。
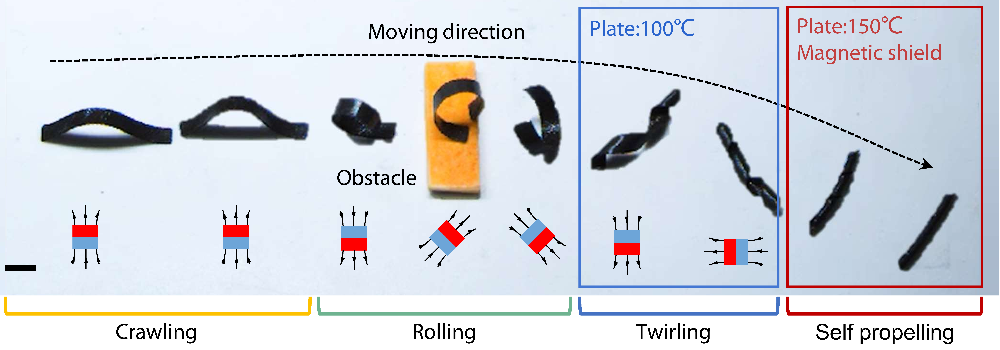
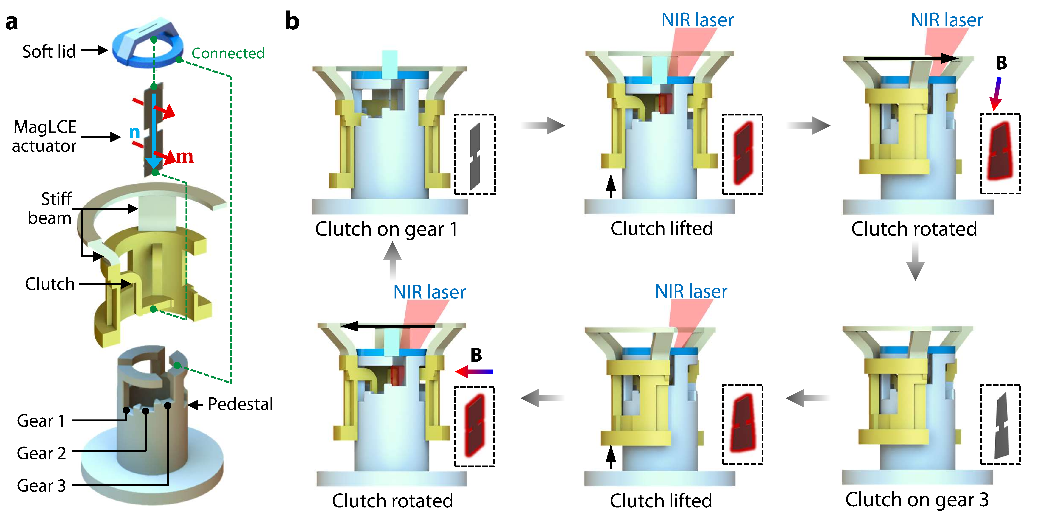
依据该技能,该作业展现了一个3D打印的铁磁液晶弹性体带状机器人,能够在不同的地势、温度和磁场环境下,以不同的形式运动,表现出强壮的环境习惯。此外,研讨人员还展现了依据铁磁液晶弹性体的多稳态力学超资料。经过磁场和近红外激光操控铁磁液晶弹性体的变形,使超资料在不同稳态之间切换,进而在紧缩过程中展现出高度可调的力学性能。
本研讨的依据成果得出,物理场辅佐的3D打印能够大幅度拓展以铁磁液晶弹性体为代表的多功能域资料的制作与编程才能,进而在不同外场影响下完成可控的多形式呼应,对软体机器人、柔性电子、超资料等范畴的开展起到推进效果。
以上作业得到了国家自然科学基金、科技部国家重点研制方案、安徽省自然科学基金支撑。我国科学技能大学精密机械与精密仪器系孙宇轩博士是该论文的榜首作者,我国科学技能大学李木军副教授、王柳特任教授、张世武教授,南边科技大学刘吉副教授为一起通讯作者。论文作者还包含我国科学技能大学彭晨晖特任教授。
米乐体育 版权所有
地址:北京市大兴区黄村镇兴华大街绿地财富中心B座701室Company Address: Rm701, Building B,Greenland Group,Xinghua Street, Daxing District,Beijing, China 电话:010-6756 6879 邮箱:z512008@163.com

关注我们